斯坦福机器狗的设计与实现 (四足机器人的电路和控制思路)
本文共 636 字,大约阅读时间需要 2 分钟。
四足机器人的电路和控制思路
线路连接

步骤:
- 连接开关,电池部分。
- 将LM2596调压模块调至6V稳压输出
- 按照电路图连接剩余线路
- 测试环节

实际操作:
电池和电源模块。

接头接到开关上。
 打开开关以后形态:
打开开关以后形态:  连接上以后打开开关注意模块后的两条线不能碰到一起,否则会短路。
连接上以后打开开关注意模块后的两条线不能碰到一起,否则会短路。 用万用表,将旋钮调到20V,将黑色的放到模块的负极上,将红色的放到正极上。
读表。电压不对时,要调成6V调金色的小头:

调节完成之后,关闭电源,防止短路。
- 接舵机扩展版:

将线接入两个螺丝的地方,JND(负极)
接完形态:
- 接PyBOARD主控
PyBOARD主控实物图:
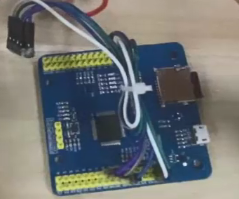 将线连接到黄色的对应的号码上
将线连接到黄色的对应的号码上 
将线与舵机扩展版连接。

将零件用螺丝固定到白色的板子上:
 按下标示的那个按钮可以看到标示的地方会闪烁一下,标示连接正常。
按下标示的那个按钮可以看到标示的地方会闪烁一下,标示连接正常。 
- 接舵机
 首先确定头部:(usb接口前就是) 接腿1:(上面确定好的4号,5号)找准位置。
首先确定头部:(usb接口前就是) 接腿1:(上面确定好的4号,5号)找准位置。  以此类推,其余腿连接方法一样。 接好线后用轧带,把线都轧到一起。
以此类推,其余腿连接方法一样。 接好线后用轧带,把线都轧到一起。
控制电路思想:
硬件设计思路:

软件设计思路:

如需查看视频教程:
http://online.edu.senlanit.com/playback/playback?cid=a0844796-d979-4dd9-9f63-a44f505793df&vid=cae40e0c-db19-451b-8e0b-d55b2684aa1f&v=1111111111 进去以后搜索:斯坦福机器狗的设计与实现(黄老师)的第三课。转载地址:http://utcsi.baihongyu.com/
你可能感兴趣的文章
JSTL 常用标签总结
查看>>
内容里面带标签,在HTML显示问题,JSTL
查看>>
VS编译器运行后闪退,处理方法
查看>>
用div+css做下拉菜单,当鼠标移向2级菜单时,为什么1级菜单的a:hover背景色就不管用了?
查看>>
idea 有时提示找不到类或者符号
查看>>
JS遍历的多种方式
查看>>
ng-class的几种用法
查看>>
node入门demo-Ajax让前端angularjs/jquery与后台node.js交互,技术支持:mysql+html+angularjs/jquery
查看>>
神经网络--单层感知器
查看>>
注册表修改DOS的编码页为utf-8
查看>>
matplotlib.pyplot.plot()参数详解
查看>>
拉格朗日对偶问题详解
查看>>
MFC矩阵运算
查看>>
最小二乘法拟合:原理,python源码,C++源码
查看>>
ubuntu 安装mysql
查看>>
c# 计算器
查看>>
C# 简单的矩阵运算
查看>>
gcc 常用选项详解
查看>>
c++输入文件流ifstream用法详解
查看>>
c++输出文件流ofstream用法详解
查看>>